



Sponsors
Temi principali
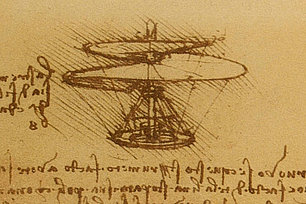
Elicotteri
Fin dalla sua esistenza l’uomo ha sognato di staccarsi da terra e volare come gli uccelli. Storicamente il primo serio studioso ad occuparsi in modo scientifico del volo e dei problemi ad esso connessi fu il genio toscano Leonardo Da Vinci (1456-1519) il quale ha lasciato numerosi disegni di macchine volanti.

Personaggi
Leggete le storie di quei personaggi che in modi diversi hanno stretto un forte legame con il mondo degli elicotteri.

Cronistoria
Riassunti in ordine cronologico gli avvenimenti più importanti che hanno in qualche modo contraddistinto la storia dell'ala rotante in Svizzera dal 1947 ad oggi.

Compagnie
Le prime dimostrazioni pubbliche effettuate in Svizzera nel 1947 e 1948 con gli apparrecchi Bell 47B e Sikorsky S-51 mostrarono chiaramente le potenzialità dell'elicottero.
Approfondimenti
-

Hughes 500D
ApprofondisciLa nascita dello Hughes 500D è direttamente legata ad un apparecchio sviluppato dalla Hughes Tool Company nella fasi finali della guerra in Vietnam…
-

Walter Hügel
ApprofondisciDopo aver lavorato come pilota istruttore nelle file dell'esercito austriaco Walter nel 1965 inizia una brillante carriera come pilota civile che lo…
-

Bagnoud François-Xavier
ApprofondisciIl 14 gennaio 1986 durante l’ottava edizione del famoso rally automobilistico Parigi-Dakar si verificò un gravissimo incidente d'elicottero che costò…